hbridge
Description
This sample demonstrates the functionality of the L298N H-BRIDGE module. This is done by either adjusting the speed of the motors from 0% to 100% using a step size of 10% or by making the car more forward and then backwards for a given amount of seconds.
Purpose
Use this sample to check if you’ve successfully managed to hook up the L298N H-BRIDGE module to your development board.
Hardware
This sample requires the L298N H-BRDIGE module be connected to the development board. Information on how to set up the H-BRIDGE module can be found here: The L298N H-BRIDGE.
Where to find?
This sample is located under: samples/hbridge.
API reference
You can find the API documentation here.
Configurations
This sample comes with the following configuration options:
CONFIG_NXPCUP_DIRECTION_SAMPLE: if set toy, the sample will demonstrate how the module can be used to change the direction of the car (forward, stop, backwards). Otherwise, if set ton, the sample will demonstrate how the module can be used to change the speed of the car (from 0% to 100%).
See Configuring your application for a tutorial on how to set this configuration.
How to build
To build this sample, run:
west build -p -b frdm_imx93//a55 samples/hbridge -D DTC_OVERLAY_FILE=frdm_imx93.overlay
west build -p -b frdm_imx93//a55 samples\hbridge -D DTC_OVERLAY_FILE=frdm_imx93.overlay
The resulting binary may be found under: build/zephyr/zephyr.bin.
How to run
To run this sample, follow the steps detailed in Booting the board.
Expected behavior
If CONFIG_NXPCUP_DIRECTION_SAMPLE is set to y and everything went well,
your serial console (ttyACM1/COM4) should display a message similar
to the one showcased below:
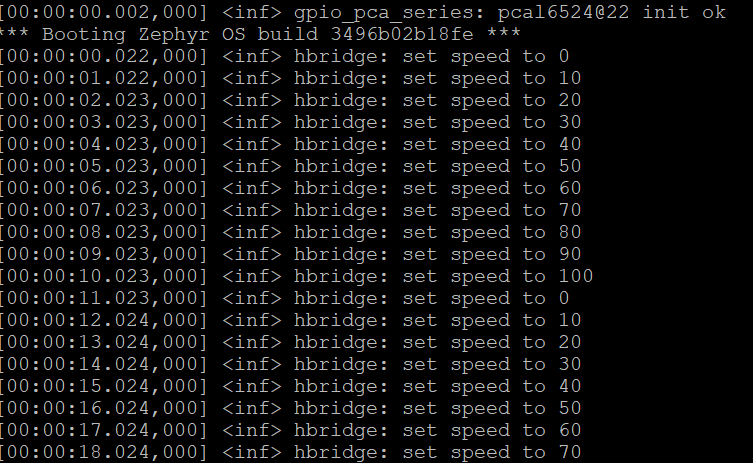
If CONFIG_NXPCUP_DIRECTION_SAMPLE is set to n, the console should print
something like this:
If CONFIG_NXPCUP_DIRECTION_SAMPLE is set to y, you should expect the
motors to spin forward for 5 seconds, stop for 1 second, spin backwards
for 5 seconds, and stop for 1 second. This cycle should be repeated in an
endless loop.
If CONFIG_NXPCUP_DIRECTION_SAMPLE is set to n, you should expect the
motors to keep spinning faster and faster in the same direction (forward) until
the maximum speed is reached. Once there, the speed should be reset to 0% and
the process should start over. This cycle should be repeated in an endless loop.