The Zephyr device driver model
The device structure
In the context of operating systems, the term device driver is used to refer to a piece of software, which is used to manage a hardware device. Usually, based on the subsystem it resides in, the device driver will implement a set of functions (known as an API), which can then be used by the upper layers (e.g. the Zephyr kernel or your application) to perform certain tasks.
In the context of Zephyr, each hardware device is represented in the software
by a struct device, which is used to hold information such as the device’s
name, a pointer to the API functions, the device driver’s private data etc… You
may find the definition of struct device
here.
As users, what we’re mostly interested in here is that most (if not all) subsystem
APIs will require (directly or indirectly) a pointer to a struct device to use.
As an example, let’s take a look at the PWM subsystem API, which you may find
here
under the Functions section. As you can see, functions such as pwm_set_cycles(),
pwm_set(), pwm_get_cycles_per_sec() etc.. take a pointer to a struct device
as one of their parameters. Now, the question is: how do we obtain a pointer to this
structure?
Creating a struct device
The Zephyr device drivers are the entities in charge of creating a
struct device for all of the hardware devices they are managing.
For this to happen, however, the devicetree nodes will have to meet
the following criteria:
Have their status set to
okay.Match one of the drivers’ programming model.
Before going into details, it’s important to clarify one thing: a device
driver can manage more than one instance of the same hardware device. For
instance, assuming that you have a SoC with two PWM controllers, the same
device driver will be used to manage both of the controllers. What differs,
however, is the struct device that’s used since each of the controllers
will have a different struct device bound to them.
Now, let’s consider the following PWM controller devicetree node as an example:
/* taken and adapted from nxp_mimx93_a55.dtsi */
tpm3: tpm@424e0000 {
compatible = "nxp,kinetis-tpm";
reg = <0x424e0000 DT_SIZE_K(64)>;
interrupts = <GIC_SPI 75 IRQ_TYPE_LEVEL IRQ_DEFAULT_PRIORITY>;
interrupt-names = "irq_0";
interrupt-parent = <&gic>;
clocks = <&ccm IMX_CCM_TPM3_CLK 0 0>;
prescaler = <1>;
#pwm-cells = <3>;
status = "okay";
};
The first thing we need to check is if the node is enabled. Therefore, we
need to check if the status property is set to okay or is missing
(in which case its value is assumed to be okay). For our example node,
we can see that this is true.
The next step is to look at the programming model (i.e. the compatible
property) and check to see if there’s a matching device driver. In our
case, the programming model is nxp,kinetis-tpm. However, we can’t use
this value directly in our query since the Zephyr device drivers expect
a different format. To convert the compatible value to the expected format,
all we have to do is replace the comma (,) and hyphens (-) with
underscores (_). This would yield the following value: nxp_kinetis_tpm.
Below, you may find some example of how to convert the compatible values found in the DTS to the format expected by the Zephyr device drivers:
nxp,tpm-timer->nxp_tpm_timernxp,imx-rgpio->nxp_imx_rgpionxp,lpuart->nxp_lpuartnxp,lpi2c->nxp_lpi2c
and so on and so forth.
We can then use the converted compatible value to look for a device driver.
To do so, you can run the following command inside
~/work/repos/nxpcup_root/zephyr (Linux) or ~\Desktop\nxpcup_root\zephyr (Windows):
git grep <compatible_value> -- drivers/
, where compatible_value is the converted compatible value. For example,
issuing:
git grep nxp_tpm_timer -- drivers/
would yield:
drivers/counter/counter_mcux_tpm.c:#define DT_DRV_COMPAT nxp_tpm_timer
Note
Some device drivers may not have the DT_DRV_COMPAT macro defined in
a source file under drivers/. In such cases, you can drop the -- drivers/
bit from the above command and let git grep look through the entire
Zephyr tree.
What we’re trying to find is a source file located under drivers that
defines the DT_DRV_COMPAT macro to the same value as our converted
compatible. In our example, that file would be counter_mcux_tpm.c.
Some more examples are shown below:
nxp_kinetis_tpm
git grep nxp_kinetis_tpm -- drivers/
drivers/pwm/pwm_mcux_tpm.c:#define DT_DRV_COMPAT nxp_kinetis_tpm
nxp_lpi2c
git grep nxp_lpi2c -- drivers/
drivers/i2c/i2c_mcux_lpi2c.c:#define DT_DRV_COMPAT nxp_lpi2c
drivers/i2c/i2c_mcux_lpi2c_rtio.c:#define DT_DRV_COMPAT nxp_lpi2c
Interestingly, we have two source files defining the DT_DRV_COMPAT
macro to the value we’re interested in. In this cases, we’d have to
check which of these two files actually gets compiled for our application.
To do so, check the content of drivers/i2c/CMakeLists.txt and look
for the corresponding configs:
/* taken and adapted from drivers/i2c/CMakeLists.txt */
if(CONFIG_I2C_RTIO)
zephyr_library_sources_ifdef(CONFIG_I2C_MCUX_LPI2C i2c_mcux_lpi2c_rtio.c)
else()
zephyr_library_sources_ifdef(CONFIG_I2C_MCUX_LPI2C i2c_mcux_lpi2c.c)
endif()
This means that if CONFIG_I2C_RTIO and CONFIG_I2C_MCUX_LPI2C are set to y,
the selected driver will be i2c_mcux_lpi2c_rtio.c. Otherwise, if CONFIG_I2C_RTIO
is set to n and CONFIG_I2C_MCUX_LPI2C is set to y, the selected driver
will be i2c_mcux_lpi2c.c.
To check for the values of the aforementioned configs, you can use the menuconfig
interface.
nxp_lpuart
git grep nxp_lpuart -- drivers/
drivers/serial/uart_mcux_lpuart.c:#define DT_DRV_COMPAT nxp_lpuart
Once we have identified the driver’s source file, we need to make sure that
it actually gets compiled in. One way to do so is to open the driver’s source
file and temporarily add a line that would break the compilation of your
application (for example: asdadasd). If your compiling your application
fails then you’re most likely set and can revert the source file back to its
original form. Otherwise, you’ll have to make sure you have all of the appropriate
configs enabled.
Let’s assume we’re compiling the hello_world sample (i.e. samples/hello_world)
and that we want to use the pwm_mcux_tpm.c driver. The first thing we notice
after adding the asdasd line to our driver is that the compilation doesn’t fail.
This might indicate that we have some config-related issues, which is why we need to
find the config associated with this driver and make sure it’s set to y.
Looking at drivers/pwm/CMakeLists.txt, we can see the following line:
zephyr_library_sources_ifdef(CONFIG_PWM_MCUX_TPM pwm_mcux_tpm.c)
Therefore, the config we’re interested is CONFIG_PWM_MCUX_TPM. Looking up this
config in the menuconfig interface yields the following result:
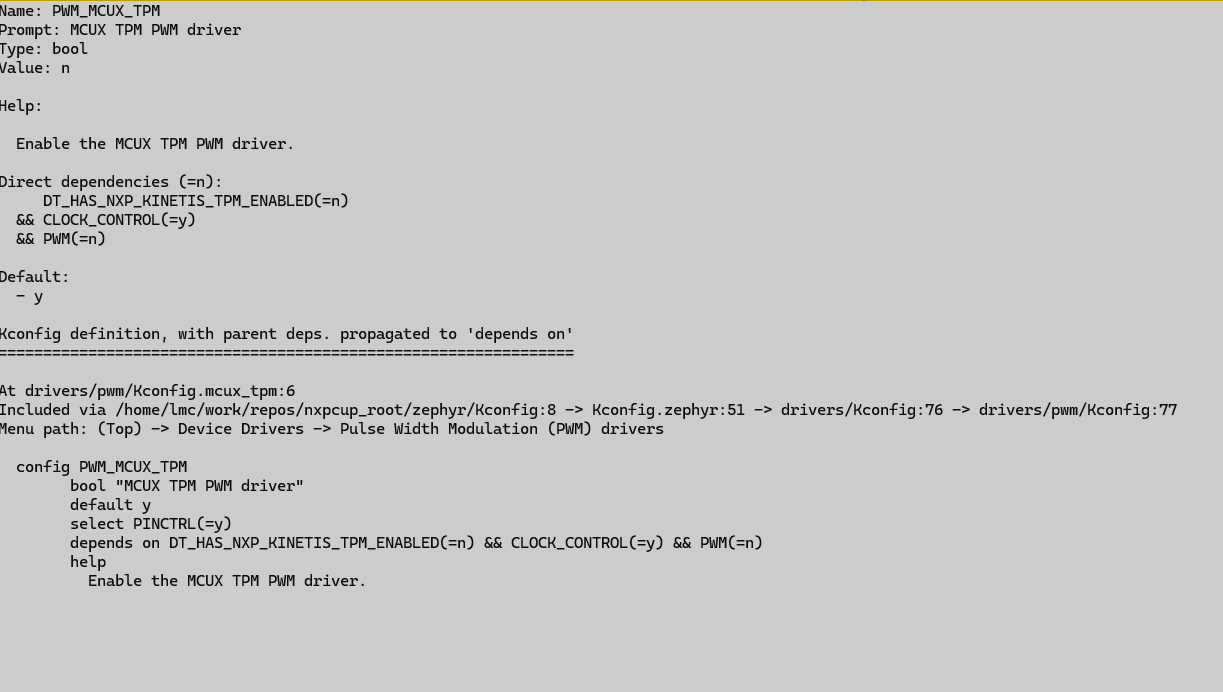
We can see that the value of this config is indeed set to n. However, we won’t
be able to directly set its value to y since it has some dependencies
(see the Direct dependencies section from the figure above) that are also set
to n: CONFIG_PWM and CONFIG_DT_HAS_NXP_KINETIS_TPM_ENABLED. Therefore,
we’ll first have to sort those out. For CONFIG_PWM, you can set directly
set its value to y via menuconfig or the prj.conf file. As for
CONFIG_DT_HAS_NXP_KINETIS_TPM_ENABLED, this config is somewhat special.
What it means is that there’s no devicetree node with the nxp,kinetis-tpm
compatible that has its status set to okay.
If we look at the board DTS or SoC DTSI we can see that there’s no node
with its compatible set to nxp,kinetis-tpm. Therefore, what we have
to do in our application devicetree overlay is change the programming
model of any of the TPM nodes like we do in samples/hbridge/frdm_imx93.overlay.
Note
Changing the node’s programming model might not be required all of the time. This mostly depends on what you’re trying to achieve (i.e. which drivers you want to use).
After making sure that both CONFIG_PWM and CONFIG_DT_HAS_NXP_KINETIS_TPM_ENABLED
are set to y, we can see that CONFIG_PWM_MCUX_TPM is also set to y and now
our driver finally gets compiled!
Getting a pointer to a struct device
To get a pointer to a struct device you can use the DEVICE_DT_GET() in
combination with the DT_NODELABEL() macro as follows:
const struct device *my_device = DEVICE_DT_GET(DT_NODELABEL(my_label));
, where my_label is the targeted node’s label. For instance, assuming
we’re interested in the tpm3 node, we’d use:
const struct device *pwm_dev = DEVICE_DT_GET(DT_NODELABEL(tpm3));
If you use this method and you get the following compilation error:
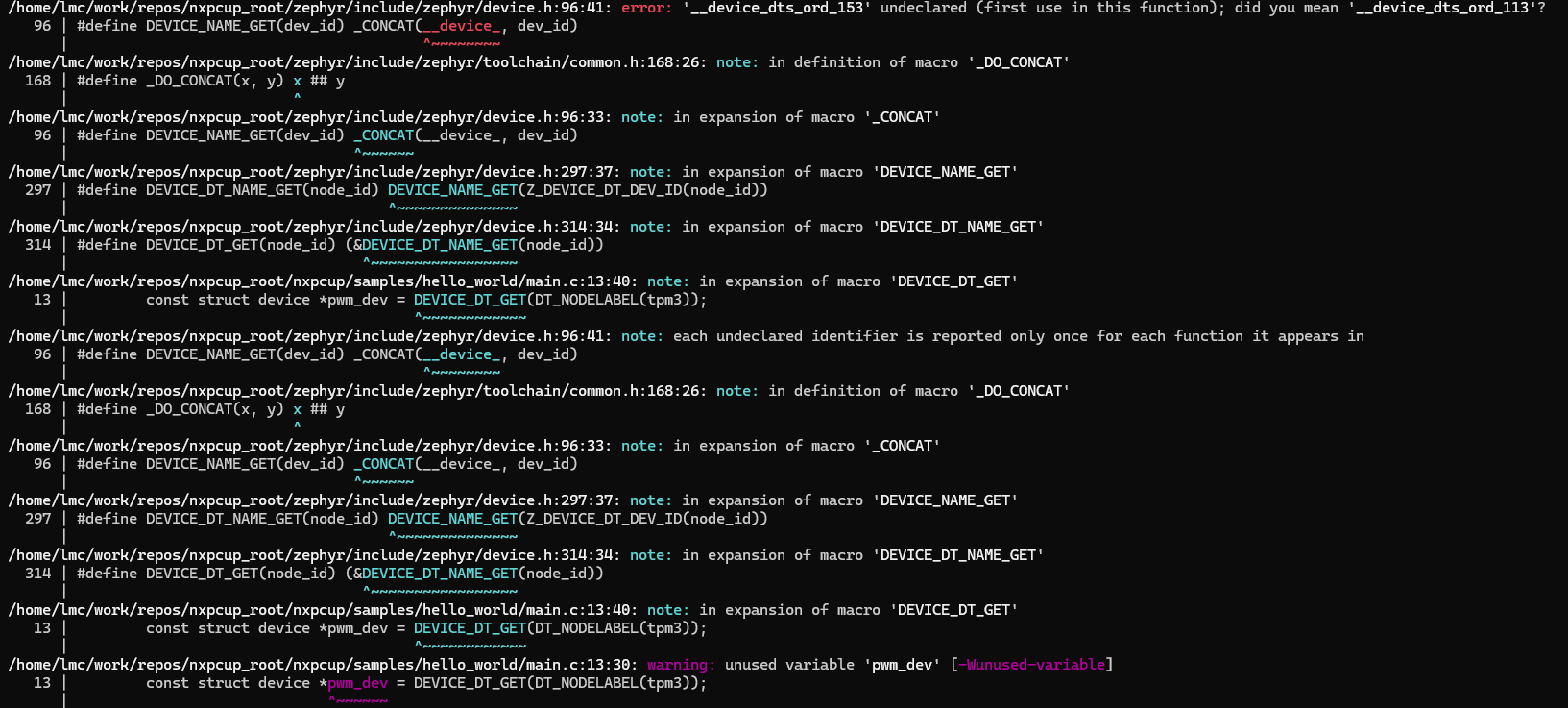
this probably means that the device driver is not being compiled.
Further reading
For more information, we encourage the reader to check out the following resources: